Наземное лазерное сканирование: различия между версиями
| [непроверенная версия] | [непроверенная версия] |
The tuss (обсуждение | вклад) Нет описания правки |
The tuss (обсуждение | вклад) Нет описания правки |
||
| Строка 56: | Строка 56: | ||
Всю совокупность ошибок в величинах, измеряемых НЛС, можно разделить на две группы: |
Всю совокупность ошибок в величинах, измеряемых НЛС, можно разделить на две группы: |
||
# |
|||
инструментальные, обусловленные качеством сборки и юстировки механических, оптических и электронных частей прибора; |
|||
| ⚫ | |||
# |
|||
| ⚫ | |||
Версия от 13:40, 28 января 2011
 | Эту статью Инкубатора предлагается удалить. |
Наземный Лазерный Сканер (НЛС) — это съёмочная система, измеряющая с высокой скоростью (от нескольких тысяч до миллиона точек в секунду) расстояния от сканера до точек объекта и регистрирующая соответствующие направляния (вертикальные и горизонтальные углы) с последующим формирование трёхмерного изображения (скана) в виде облака точек.
Сущность наземного лазерного сканирования и его преимущества
Система наземного лазерного сканирования состоит из НЛС и полевого персонального компьютера со специализированным программным обеспечением. НЛС состоит из лазерного дальномера, адаптированного для работы с высокой частотой, и блока развертки лазерного луча. В качестве блока развёртки в НЛС выступают сервопривод и полигональное зеркало или призма. Сервопривод отклоняет луч на заданную величину в горизонтальной плоскости, при этом поворачивается вся верхняя часть сканера, которая называется головкой. Развёртка в вертикальной плоскости осуществляется за счёт вращения или качания зеркала.
В процессе сканирования фиксируется направление распространения лазерного луча и расстояние до точек объекта. Результатом работы НЛС является растровое изображение - скан, значения пикселей которого представляют собой элементы вектора со следующими компонентами: измеренным расстоянием, интенсивностью отражённого сигнала и RGB-составляющей, характеризующей реальный цвет точки. Для большинства моделей НЛС характеристики реального цвета для каждой точки получается с помощью неметрической цифровой камеры.
Другой формой представления результатов наземного лазерного сканирования является массив точек лазерных отражений от объектов, находящихся в поле зрения сканера, с пятю характеристиками, а именно пространственными координатами (x,y,z), интенсивностью и реальным цветом.
В основу работы лазерных дальномеров, используемых в НЛС, положены импульсный и фазовый безотражательные методы измерения расстояний, а также метод прямой угловой развёртки (триангуляционный метод).
Принцип действия наземных лазерных сканеров

Импульсный метод измерения расстояний
Импульсный метод измерения расстояний основан на измерении времени прохождения сигнала от приёмо-передающиего устройства до объекта и обратно. Зная скорость распространения электромагнитных волн c, можно определить расстояние как: R = c * τ / 2
где τ — время, измеряемое с момента подачи импульса на лазерный диод до момента приёма отражённого сигнала.
Фазовый метод измерения расстояний
Фазовый метод измерения расстояний основан на определении разности фаз посылаемых и принимаемых модулированных сигналов. В этом случае расстояние вычисляется по формуле: R = φ2R * c / (4π * ƒ),
где φ2R — разность фаз между опорным и рабочим сигналом; ƒ — частота модуляции.
Триангуляционный метод измерения расстояний
В настоящее время существует два варианта реализации триангуляционного метода измерения расстояний.
-
 рис.2 Принцип действия НЛС Mensi Soisic и S-series (вид сверху)
рис.2 Принцип действия НЛС Mensi Soisic и S-series (вид сверху) -
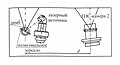 рис.3 Принцип действия НЛС Minolta (вид сбоку)
рис.3 Принцип действия НЛС Minolta (вид сбоку)


Сущность первого варианта измерния расстояний триангуляционными сканерами заключается в следующем: с помощью проектора лазерный луч низкой мощности отклоняется от исходного направления. Угол θ1, образуемый базисом сканера d и лазерным лучом, вычисляется по положению изображения лазреного пятна на приёмнике первой ПЗС-камеры. Угол θ2образуется осью (базисом) сканера и вектором распространения отражённого сигнала от объекта, фиксируемого второй ПЗС-камерой.
Сущность второго принципа действия триангуляционных лазерных сканеров показана на рис.2. В сканерах данного типа вместо ПЗС-камеры используется полигональное зеркало, которое при помощи сервопривода отклоняет лазерный луч. В данном случае угол θ1 измеряется при помощи лимба, который регистрирует угол поворота полигонального зеркала относительно начального положения. Основные особенности при измерении расстояний данными триангуляционными НСЛ: 1) развертка луча в горизонтальной плоскости происходит при помощи системы линз, расположенных вблизи лазерного источника, поэтому сканирование выполняется не лучом, а плоскостью; 2) остутствует сервопривод, который выполняет поворт головки сканера.
Преимущества наземного лазерного сканирования
Помимо высокой степени автоматизации, наземное лазерное сканирование обладает также следующими достоинствами по отношению к другим способам получения пространственной информации:
- возможность определения пространственных координат точек объекта в полевых условиях;
- трёхмерная визуализация в режиме реального вермени, позволяющая на этапе производства полевых работ определить «мёртвые» зоны;
- неразрушающий метод получнеия информации;
- отсутствие необходимости обеспечения сканирования точек объекта с двух центров проектирования (стояния), в отличие от фотограмметрического способа;
- высокая точность измерений;
- принцип дистанционного получения информации обеспечивает безопасность исполнителя при съёмке труднодоступных и опасных районов;
- высокая произоводительность НЛС сокращает время полевых работ при создании цифровых моделей объектов, что делает данную технологию более экономически выгодной по сравнению с другими;
- работы можно выполнять при любых условиях освещения, то есть днём и ночью, так как сканеры являются активными съёмочными системами;
- высокая степень детализации;
- многоцеловое использование результатов лазерного сканирования.
Обзор и классификация НЛС
В настоящее время разработкой приборов для трёхмерного лазерного сканирования занимается множество фирм: Leica Geo-Systems (Швецерия), Trimble (США), Reigl (Австрия), Zoller+Frohlich (Германия), Topcon (Япония), I-Site (Австралия), Faro Technologies (США) и другие.
Источники и классификация ошибок в результатах наземного лазерного сканирования
Всю совокупность ошибок в величинах, измеряемых НЛС, можно разделить на две группы:
инструментальные, обусловленные качеством сборки и юстировки механических, оптических и электронных частей прибора;
методические, источником которых является сам метод определения величин с помощью НЛС.
Примечания
Литература
- «Наземное Лазерное Сканирование» \\ Середович В. А., Комиссаров А. В., Комиссаров Д. В., Широкова Т. А.