Фотоматрица: различия между версиями
| [непроверенная версия] | [непроверенная версия] |
| Строка 62: | Строка 62: | ||
* Разрешение в пикселях. (англ. Pixel resolution.) Определяется числом эффективных пикселей (effective pixels) матрицы. |
* Разрешение в пикселях. (англ. Pixel resolution.) Определяется числом эффективных пикселей (effective pixels) матрицы. |
||
* Разрешение в TV lines (ТВЛ). |
|||
'''Разрешение в Television lines. Различают разрешающую возможность по горизонтали (TVLH) и вертикали (TVLV). |
|||
* Пространственное разрешение. (англ. Spatial resolution.) Количество пикселей на дюйм - [[ppi]] ({{lang-en|pixels per inch}}). |
* Пространственное разрешение. (англ. Spatial resolution.) Количество пикселей на дюйм - [[ppi]] ({{lang-en|pixels per inch}}). |
||
* Спектральное разрешение. (англ. Spectral resolution.) Спектральная ширина [[Электромагнитное излучение|электромагнитного]] излучения в [[Свет|видимой]] и ближней зоне [[Инфракрасное излучение|инфракрасной]] области. |
* Спектральное разрешение. (англ. Spectral resolution.) Спектральная ширина [[Электромагнитное излучение|электромагнитного]] излучения в [[Свет|видимой]] и ближней зоне [[Инфракрасное излучение|инфракрасной]] области. |
||
Версия от 14:57, 19 декабря 2013
Эту страницу предлагается объединить со страницей Разрешение матрицы цифровой фотокамеры. |

Ма́трица или светочувстви́тельная ма́трица — специализированная аналоговая или цифро-аналоговая интегральная микросхема, состоящая из светочувствительных элементов — фотодиодов.
- Предназначена для преобразования проецированного на неё оптического изображения в аналоговый электрический сигнал или в поток цифровых данных (при наличии АЦП непосредственно в составе матрицы).
- Является основным элементом цифровых фотоаппаратов, современных видео- и телевизионных камер, фотокамер, встроенных в мобильный телефон, камер систем видеонаблюдения и многих других устройств.
- Применяется в оптических детекторах перемещения компьютерных мышей, сканерах штрих-кодов, планшетных и проекционных сканерах, системах астро- и солнечной навигации.
Устройство одного пикселя матрицы
Архитектура пикселей у производителей разная. Для примера здесь приводится архитектура ПЗС-пикселя.
Пример субпикселя ПЗС-матрицы с карманом n-типа
Обозначения на схеме субпикселя ПЗС-матрицы — матрицы с карманом n-типа:
1 — фотоны света, прошедшие через объектив фотоаппарата;
2 — микролинза субпикселя;
3 — R — красный светофильтр субпикселя, фрагмент фильтра Байера;
4 — прозрачный электрод из поликристаллического кремния или сплава индия и оксида олова;
5 — оксид кремния;
6 — кремниевый канал n-типа: зона генерации носителей — зона внутреннего фотоэффекта;
7 — зона потенциальной ямы (карман n-типа), где собираются электроны из зоны генерации носителей заряда;
8 — кремниевая подложка p-типа.
Микролинза субпикселя
Буферные регистры сдвига на ПЗС-матрице, равно как и обрамление КМОП-пиксела на КМОП-матрице «съедают» значительную часть площади матрицы, в результате, каждому пикселю достаётся лишь 30 % светочувствительной области от его общей поверхности. У матрицы с полнокадровым переносом эта область составляет 70 %. Именно поэтому в большинстве современных ПЗС матриц над пикселем устанавливается микролинза. Такое простейшее оптическое устройство покрывает бо́льшую часть площади ПЗС-элемента и собирает всю падающую на эту часть долю фотонов в концентрированный световой поток, который, в свою очередь, направлен на довольно компактную светочувствительную область пиксела.
Характеристики матриц
Светочувствительность (более коротко чувствительность), отношение сигнал-шум и физический размер пикселя однозначно взаимосвязаны (для матриц, созданных по одной и той же технологии). Чем больше физический размер пикселя, тем больше получаемое соотношение сигнал-шум при заданной чувствительности, или тем выше чувствительность при заданном соотношении сигнал-шум. Физический размер матрицы и её разрешение однозначно определяют размер пикселя. Размер пикселя напрямую определяет такую важную характеристику, как фотографическая широта.
Отношение сигнал/шум
Всякая физическая величина совершает некоторые колебания от своего среднего состояния, в науке это называется флуктуациями. Поэтому и каждое свойство всякого тела тоже изменяется, колеблясь в некоторых пределах. Это справедливо и для такого свойства, как светочувствительность фотоприемника, независимо от того, что собой представляет этот фотоприемник. Следствием этого является то, что некоторая величина не может иметь какого-то конкретного значения, а изменяется в зависимости от обстоятельств. Если, например, рассмотреть такой параметр фотоприемника, как «уровень чёрного», то есть то значение сигнала, которое будет показывать фотодатчик при отсутствии света, то и этот параметр будет некоторым образом флуктуировать, в том числе эта величина будет меняться от одного фотодатчика к другому, если они образуют некоторый массив (матрицу).
В качестве примера можно рассмотреть обычную фотопленку, где фотодатчики — зерна бромистого серебра, и их размер и «качество» неконтролируемо меняются от точки к точке (изготовитель фотоматериала может обеспечить только среднее значение параметра и величину его отклонения от среднего значения, но не сами конкретные значения этой величины в конкретных позициях). В силу этого обстоятельства пленка, проявленная без экспозиции, покажет некоторое, очень маленькое, но отличное от нуля почернение, которое называется «вуаль». И у фотоматрицы цифрового фотоаппарата наблюдается то же самое явление. В науке такое явление называется шумом, так как оно мешает правильному восприятию и отображению информации, и для того, чтобы изображение хорошо передавало структуру исходного сигнала, необходимо, чтобы уровень сигнала в некоторой степени превосходил уровень шумов, характерных для данного устройства. Это называется отношением сигнал/шум.[1]
Чувствительность
К матрицам применяется термин эквивалентный «чувствительности», потому что:
- в зависимости от назначения матрицы формальное значение чувствительности может определяться различными способами по различным критериям;
- аналоговым усилением сигнала и цифровой постобработкой можно менять значение чувствительности матрицы в широком диапазоне.
У цифровых фотоаппаратов значение эквивалентной чувствительности может меняться в диапазоне ISO 50—12800. Максимальная используемая в массовых фотоаппаратах чувствительность соответствует отношению сигнал/шум 2-5.
Разрешение
Разрешение матрицы цифровой фотокамеры - способность устройства передавать мелкие детали изображения.[2] Фотоматрица применяется в виде специализированной аналоговой или цифро-аналоговой интегральной микросхемы, состоящей из светочувствительных элементов. Она предназначена для преобразования проецированного на неё оптического изображения в аналоговый электрический сигнал или в поток цифровых данных (при наличии АЦП непосредственно в составе матрицы).
Говорить о фактическом разрешении получаемых изображений можно либо в отношении устройства вывода - экранов, принтеров и т.п., либо в отношении сфотографированных предметов, с учётом их перспективных искажений при съёмке и характеристик объектива. Разрешение изображения в основном определяется источником, то есть разрешением фотоматрицы, что в свою очередь зависит от их типа, площади, количества пикселов на ней и плотности фоточувствительных элементов на единицу поверхности. Не удастся отобразить на мониторе больше деталей (даже если сам монитор способен на это), чем зафиксировала матрица фотокамеры.[3]
Разрешение аналоговых и цифровых фотоматриц может быть описана по-разному.[4] [5]
- Разрешение в пикселях. (англ. Pixel resolution.) Определяется числом эффективных пикселей (effective pixels) матрицы.
- Разрешение в TV lines (ТВЛ).
Разрешение в Television lines. Различают разрешающую возможность по горизонтали (TVLH) и вертикали (TVLV).
- Пространственное разрешение. (англ. Spatial resolution.) Количество пикселей на дюйм - ppi (англ. pixels per inch).
- Спектральное разрешение. (англ. Spectral resolution.) Спектральная ширина электромагнитного излучения в видимой и ближней зоне инфракрасной области.
- Временное разрешение. (англ. Temporal resolution.) Мера скорости обновления кадров в секунду (frames/s) (англ. frames per second).
- Радиометрическое разрешение. (англ. Radiometric resolution.) Выражается единицей бит на пиксель - bpp (англ. bits per pixel).
Разрешение в пикселях
Разрешение матрицы цифровой фотокамеры - возможность фотосенсоров, наблюдать или измерять наименьший объект, с явно чёткими границами.
Существует разница между разрешением и пикселем, пиксель на самом деле является единицей цифрового изображения. Так как матрица состоит из дискретных пикселов, и поэтому информация одной ТВ-линии состоит из дискретных значений, соответствующих каждому пикселу. Этот метод дает не цифровую информацию, а скорее дискретную выборку. Таким образом матрица - это оптическое устройство дискретизации. Разрешающая способность, даваемая матрицей, зависит от числа пикселов и разрешающей способности объектива. [3]
В технических характеристиках цифровых камер обычно указывается число действующих (эффективных) мегапикселей (Number of Effective Pixel), то есть общее число пикселей, фактически используемых для регистрации изображения, а не общее число номинальных мегапикселей, фиксируемых датчиком изображения.
Термин Разрешение в области цифровых изображений, часто интерпретируется как pixel, хотя американские, японские, и международные стандарты определяют, что оно не должна использоваться так, по крайней мере, в digital camera области. [6][7]
Разрешение в матрице "Width x Height" (Pixels)
Изображение из N пикселей в высоту на M пикселей в ширину может иметь любое разрешение меньше, чем N линий по высоте изображения, или N TV lines. Когда количеством пикселей определяют разрешение, то их описывают с набором двух положительных целых чисел, где первая цифра является числом пиксельных столбцов (ширина), а вторая является числом пиксельных строк (высота), например, в виде 7680 x 6876.
Общее количество пикселей (Mpix)
Другое популярное соглашение Number of Total Pixel определяет разрешение, как общее количество пикселей в изображении, и даётся как количество мегапикселей, которая может быть вычислена путем умножения колонки пикселей на пиксели строк и деления на один миллион.
Число эффективных пикселей (Effective pixels)
Ни одна из вышеуказанных пиксельных резолюций не являются истинной резолюцией , но они широко упоминаются в таком качестве и служат верхней границей разрешения изображения.
Согласно тем же стандартам, именно число эффективных пикселей (Number of Effective Pixel) указывает на фактическое разрешение матрицы, так как именно они вносят вклад в окончательное изображение, в отличие от ряда общих пикселей, которые включают в себя неиспользуемые, "битые" или светозащищённые пиксели по краям.
Разрешение матриц зависит от их типа, площади и плотности светочувствительных элементов на единицу поверхности.
Оно нелинейно и зависит от светочувствительности матрицы и от заданного программой уровня шума.
Важно, что современная иностранная трактовка линий миры считает пару черная и белая полоса - за 2 линии, - в отличие от отечественных теории и практики, где каждая линия всегда считается разделенной промежутками контрастного фона толщиной, равной толщине линии.
Некоторые фирмы - производители цифровых фотоаппаратов в рекламных целях пытаются повернуть матрицу под углом в 45°, достигая определённого формального повышения разрешения при фотографировании простейших горизонтально-вертикальных мир. Но если использовать профессиональную миру, или хотя бы повернуть простую миру под тем же углом, становится очевидным, что повышение разрешения - фиктивное.
Ниже приведен пример того, как одно и то же изображение может отображаться при различных разрешениях в пикселях.

Изображение, которое составляет 2048 пикселей в ширину и 1536 пикселей в высоту имеет в общей сложности 2048 х 1536 = 3145728 пикселей или 3,1 мегапикселя. Можно ссылаться на него как 2048 по 1536 или 3,1 - мегапиксельное изображение.
К сожалению, количество пикселей не является реальным показателем разрешения цифровой фотокамеры, - если это не трёхматричная система 3CCD, а в обычной CCD системе датчики цветного изображения, как правило, построены на альтернативных цветных фильтрах, где каждый пиксель матрицы отвечает только за один цвет, который более светочувствителен к конкретному цвету. Цифровые изображения, в конечном счёте, требуют красного, зеленого и синего значений для каждого пикселя, которые будет отображаться в дальнейшем, но один пиксель в фотосенсоре будет поставлять только один из этих трех цветов информации. В результате цветовой интерполяции получается полноцветная картина на одной матрице, где каждая точка уже имеет все три необходимые цветовые компоненты.
Однако, реальное разрешение получаемого изображения (то есть степень различимости деталей), кроме пиксельного разрешения сенсора зависит от оптического разрешения объектива и устройства сенсора.
Разрешение в TV lines (ТВЛ)
Разрешение в Television lines (твл) - способность устройства передавать максимальное количество деталей изображения. Для двумерных устройств таких как ПЗС-матрица, различают разрешающую возможность по горизонтали и вертикали.
Вертикальное разрешение TV lines
Вертикальное разрешение определяется числом вертикальных элементов, которые можно фиксировать камерой и воспроизвести на экране монитора. В система CCIR - 625 линий, в EIA - 525 линий. Принимая во внимание длительность кадровой (вертикальной) синхронизации и импульсов выравнивания, невидимые строки и т.д., число активных строк снижается в CCIR до 575, а в EIA до 475. При вычислении "реального" вертикального разрешения следует применять поправочный коэффициент, равный 0,7. Он известен как коэффициент Келла (или Келл-фактор Kell factor) и является общепринятым способом аппроксимации реального разрешения. Это означает, что 575 следует скорректировать (умножить) на 0.7, чтобы получить практические границы вертикального разрешения для PAL, которое равняется примерно 400 ТВ-линиям строк. [3] Для NTSC, соответственно получается приблизительно 330 ТВ-линий (строк) вертикального разрешения.
Горизонтальное разрешение TV lines
Разрешающая способность по горизонтали (горизонтальное разрешение) определяется числом горизонтальных элементов, которые можно зафиксировать камерой и воспроизвести на экране монитора или сколько вертикальных линий можно подсчитать. Поскольку соотношение сторон в телевидении стандартной чёткости составляет 4:3, где ширина больше высоты, то чтобы сохранить естественные пропорции изображений, считают только вертикальные линии по ширине, эквивалентной высоте, т.е. 3/4 от ширины. Для камеры с 570 ТВ-линиями горизонтального разрешения, максимум соответствует приблизительно в 570x4/3=760 линий по ширине экрана.
Если в документации указана только разрешающая способность, то это надо понимать, как разрешающая способность по горизонтали. (Например: 960H).
Многие производители предпочитают опираться на результаты собственных не сертифицированных тестов, в которых применяются специальные штриховые миры. Источники погрешностей таких тестов связаны с применением нестандартных мир, с неточным их позиционированием и с погрешностью определения разрешаемых штрихов. Никогда не бывает так, чтобы, скажем, 380 линий различить было можно, а 390 уже нельзя. При увеличении числа линий контраст падает плавно, и корректней было бы говорить о предельном числе линий, при наблюдении которых контраст снижается до некоторого заданного уровня. При этом важно то, как размещаются штрихи в кадре (радиально или тангенциально) и в какой части кадра они находятся (в центре или с краю). Однако реальные методики определения разрешающей способности производителями камер остаются для потребителей неизвестными.
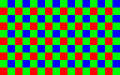
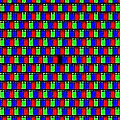
Пространственное разрешение
Пространственное разрешение - величина, характеризующая размер наименьших объектов, различимых на изображении. А это зависит от свойств системы, создающей изображение, а не только количеством пикселей на дюйм - ppi (англ. pixels per inch).


Изображение слева имеет более высокое количество пикселей, чем правое, но при этом хуже в пространственном разрешении.
Фотоматрица оцифровывает (разделяет на кусочки - <пиксели>) то изображение, которое формируется объективом фотоаппарата. Но, если объектив в силу недостаточно высокой разрешающей способности передаёт ДВЕ светящиеся точки объекта, разделённые третьей чёрной, как одну светящуюся точку на ТРИ подряд расположенных пиксела, то говорить о точном разрешении изображения фотоаппаратом не приходится.
В фотографической оптике существует приблизительное соотношение[8]: если разрешающую способность фотоприемника выразить в линиях на миллиметр (или же в количестве пикселей на дюйм - ppi (англ. pixels per inch), обозначим её как M, и так же выразить разрешающую способность объектива (в его фокальной плоскости), обозначим её как N, то результирующее разрешение системы объектив+фотоприемник, обозначим его как K, можно найти по формуле:
или .


Это соотношение максимально при , когда разрешение равно , поэтому желательно, чтобы разрешающая способность объектива соответствовала разрешающей способности фотоприемника.[уточнить]


У современных цифровых фотоматриц разрешающая способность определяется количеством пикселей на дюйм - ppi (англ. pixels per inch), при этом размер пикселя варьируется у разных фотоматриц в пределах от 0,0025 мм до 0,0080 мм, а у большинства современных фотоматриц он равен 0,006 мм. Поскольку две точки будут различаться если между ними находится третья (незасвеченная) точка, то разрешающая способность соответствует расстоянию в два пикселя, то есть:
, где — размер пикселя.


У цифровых фотоматриц разрешающая способность составляет от 200[источник не указан 5100 дней] линий на миллиметр (у крупноформатных цифровых фотокамер) до 70[источник не указан 5100 дней] линий на миллиметр(у web-камер и мобильных телефонов).
Спектральное разрешение
Спектральное разрешение (спектральная ширина) электромагнитного излучения - способность различать близкие по частоте (длине волны) сигналы. Многозональная съёмка изображения в разных участках электромагнитного спектра (например инфракрасной и видимой области), имеет более высокое спектральное разрешение, чем обычное цветное изображение. Спектральное разрешение актуально для съёмки с инфракрасной подсветкой в режиме "Day & Night". От видимого спектра (790ТГц/380нм - 405ТГц/740нм), до так называемой ближней области инфракрасного излучения (405ТГц/740нм - 215ТГц/1400нм), применяемого для систем видеофиксации.
Временное разрешение
Временное разрешение - мера скорости обновления кадров в секунду frames per second (frames/s).
Movie camera и high-speed camera могут фиксировать события в разных временных интервалах. Временное разрешение используется для просмотра фильмов, как правило, от 24 до 48 кадров в секунду, в то время как высокоскоростные камеры могут обеспечить от 50 до 300 frames per second (frames/s), и даже больше.
-
-
 LCD (Треугольная геометрия пикселей)
LCD (Треугольная геометрия пикселей) -



Радиометрическое разрешение
Радиометрическое разрешение (битовая Глубина цвета, качество цветопередачи, битность изображения) - термин, означающий объём памяти в количестве бит, используемых для хранения и представления цвета при кодировании одного пикселя видеоизображения. Определяет, насколько тонко система может представлять или отличать различия интенсивности цвета, и, как правило, выражается в виде уровней или bits, например 8 бит или 256 уровней (8-битный цвет (28 = 256 цветов).
Часто выражается единицей бит на пиксель - bpp (англ. bits per pixel).
Фотосенсоры, применяемые в цифровых камерах
Ширина (px) Высота (px) Соотношение сторон Фактическое количество пикселей Мегапиксели Примеры камер 100 100 1:110,000 0.01 Kodak (by Steven Sasson) Prototype (1975) 640 480 
307,200 0.3 Apple QuickTake 100 (1994) 832 608
505,856 0.5 Canon Powershot 600 (1996) 1,024 768
786,432 0.8 Olympus D-300L (1996) 1024 1024 1:11,048,576 1.0 Nikon NASA F4 (1991) 1,280 960
1,228,800 1.3 Fujifilm DS-300 (1997) 1,280 1,024 5:41,310,720 1.3 Fujifilm MX-700, Fujifilm MX-1700 (1999), Leica Digilux (1998), Leica Digilux Zoom (2000) 1,600 1,200
1,920,000 2 Nikon Coolpix 950, Samsung GT-S3500 2,012 1,324 
2,663,888 2.74 Nikon D1 2,048 1,536
3,145,728 3 Canon PowerShot A75, Nikon Coolpix 995 2,272 1,704
3,871,488 4 Olympus Stylus 410, Contax i4R (although CCD is actually square 2,272?2,272) 2,464 1,648
4,060,672 4.1 Canon 1D 2,560 1,920
4,915,200 5 Olympus E-1, Sony Cyber-shot DSC-F707, Sony Cyber-shot DSC-F717 2,816 2,112
5,947,392 5.9 Olympus Stylus 600 Digital 3,008 2,000
6,016,000 6 D100,Nikon D40, D50, D70, D70s, Pentax K100D, Konica Minolta Maxxum 7D, Konica Minolta Maxxum 5D, Epson R-D1 3,072 2,048
6,291,456 6.3 Canon EOS 10D, Canon EOS 300D 3,072 2,304
7,077,888 7 Olympus FE-210, Canon PowerShot A620 3,456 2,304
7,962,624 8 Canon EOS 350D 3,264 2,448
7,990,272 8 Olympus E-500, Olympus SP-350, Canon PowerShot A720 IS, Nokia 701, HTC Desire HD, Apple iPhone 4S 3,504 2,336
8,185,344 8.2 Canon EOS 30D, Canon EOS-1D Mark II, Canon EOS-1D Mark II N 3,520 2,344
8,250,880 8.25 Canon EOS 20D 3,648 2,736
9,980,928 10 Canon PowerShot G11, Canon PowerShot G12, Canon PowerShot S90, Canon PowerShot S95, Nikon CoolPix P7000, Nikon CoolPix P7100, Olympus E-410, Olympus E-510, Panasonic FZ50, Fujifilm FinePix HS10, Samsung EX1 3,872 2,592
10,036,224 10 Nikon D40x, Nikon D60, Nikon D3000, Nikon D200, Nikon D80, Pentax K10D, Pentax K200D, Sony Alpha A100 3,888 2,592
10,077,696 10.1 Canon EOS 40D, Canon EOS 400D, Canon EOS 1000D 4,064 2,704
10,989,056 11 Canon EOS-1Ds 4,000 3,000
12,000,000 12 Canon Powershot G9, Fujifilm FinePix S200EXR, Nikon Coolpix L110, Kodak Easyshare Max Z990 4,256 2,832
12,052,992 12.1 Nikon D3, Nikon D3S, Nikon D700, Fujifilm FinePix S5 Pro 4,272 2,848
12,166,656 12.2 Canon EOS 450D 4,032 3,024
12,192,768 12.2 Olympus PEN E-P1 4,288 2,848
12,212,224 12.2 Nikon D2Xs/D2X, Nikon D300, Nikon D300S, Nikon D90, Nikon D5000, Pentax K-x 4,900 2,580 
12,642,000 12.6 RED ONE Mysterium 4,368 2,912
12,719,616 12.7 Canon EOS 5D 5,120 2,700
13,824,000 13.8 RED Mysterium-X 7,920 (2,640 × 3) 1,760
13,939,200 13.9 Sigma SD14, Sigma DP1 (3 layers of pixels, 4.7 MP per layer, in Foveon X3 sensor) 4,672 3,104
14,501,888 14.5 Pentax K20D, Pentax K-7 4,752 3,168
15,054,336 15.1 Canon EOS 50D, Canon EOS 500D, Sigma SD1 4,896 3,264
15,980,544 16.0 Fujifilm X-Pro1, Fujifilm X-E1 (X-Trans sensor has a different pattern to a Bayer sensor) 4,928 3,262
16,075,136 16.1 Nikon D7000, Nikon D5100, Pentax K-5 4,992 3,328
16,613,376 16.6 Canon EOS-1Ds Mark II, Canon EOS-1D Mark IV 5,184 3,456
17,915,904 17.9 Canon EOS 7D, Canon EOS 60D, Canon EOS 600D, Canon EOS 550D, Canon EOS 650D, Canon EOS 700D 5,270 3,516
18,529,320 18.5 Leica M9 5,616 3,744
21,026,304 21.0 Canon EOS-1Ds Mark III, Canon EOS-5D Mark II 6,048 4,032
24,385,536 24.4 Sony ? 850, Sony ? 900, Sony Alpha 99, Nikon D3X and Nikon D600 7,360 4,912
36,152,320 36.2 Nikon D800 7,500 5,000
37,500,000 37.5 Leica S2 7,212 5,142
39,031,344 39.0 Hasselblad H3DII-39 7,216 5,412
39,052,992 39.1 Leica RCD100 7,264 5,440
39,516,160 39.5 Pentax 645D 7,320 5,484
40,142,880 40.1 Phase One IQ140 7,728 5,368 ~ 10:7 41,483,904 41.5 Nokia 808 PureView 8,176 6,132
50,135,232 50.1 Hasselblad H3DII-50, Hasselblad H4D-50 11,250 5,000 9:4 56,250,000 56.3 Better Light 4000E-HS (scanned) 8,956 6,708
60,076,848 60.1 Hasselblad H4D-60 8,984 6,732
60,480,288 60.5 Phase One IQ160, Phase One P65+ 10,320 7,752
80,000,640 80 Leaf Aptus-II 12, Leaf Aptus-II 12R 10,328 7,760
80,145,280 80.1 Phase One IQ180 9,372 9,372 1:187,834,384 87.8 Leica RC30 (point scanner) 12,600 10,500 6:5132,300,000 132.3 Phase One PowerPhase FX/FX+ (line scanner) 18,000 8,000 9:4 144,000,000 144 Better Light 6000-HS/6000E-HS (line scanner) 21,250 7,500 17:6 159,375,000 159.4 Seitz 6x17 Digital (line scanner) 16,352* 12,264*
200,540,928 200.5 Hasselblad H4D-200MS (*actuated multi (6x) shot) 18,000 12,000
216,000,000 216 Better Light Super 6K-HS (line scanner) 24,000 15,990 ~
383,760,000 383.8 Better Light Super 8K-HS (line scanner) 30,600 13,600 9:4 416,160,000 416.2 Better Light Super 10K-HS (line scanner) 62,830 7,500 ~ 25:3 471,225,000 471.2 Seitz Roundshot D3 (80 mm lens) (scanned) 62,830 13,500 ~ 5:1 848,205,000 848.2 Seitz Roundshot D3 (110 mm lens) (line scanner) 38,000 38,000 1:11,444,000,000 1,444 Pan-STARRS PS1 157,000 18,000 ~ 26:3 2,826,000,000 2,826 Better Light 300 mm lens Digital (line scanner)
Физический размер матрицы

Физические размеры фотосенсоров определяются размером отдельных пикселей матрицы, которые в современных фотосенсорах имеют величину 0,005-0,006 мм. Чем крупнее пиксель, тем больше его площадь и количество собираемого им света, поэтому тем выше его светочувствительность и лучше отношение сигнал/шум (в плёночной фотографии шумы называются «зернистостью» или «гранулярностью»). Необходимое разрешение деталей фотографии определяет общее количество пикселей, которое в современных фотоматрицах достигает десятков миллионов пикселей (Мегапикселей), и тем задаёт физические размеры фотоматрицы.
- Законы оптики определяют зависимость ГРИП от физического размера матрицы. Если сфотографировать тремя фотоаппаратами с разным физическим размером матрицы одну и ту же сцену с одним и тем же углом зрения и одним и тем же значением диафрагмы на объективах, и изучить результат (файл на компьютере, распечатку с принтера) в одинаковых условиях, то ГРИП на снимке, сделанном фотоаппаратом с наименьшей матрицей, будет наибольшей (больше предметов в кадре будет показано резко), а фотоаппарат с наибольшей матрицей покажет наименьшую ГРИП (предметы не в зоне резкости будут сильнее размыты).
- Размеры фотосенсоров чаще всего обозначают как «тип» в виде дробных частей дюйма (например, 1/1.8" или 2/3"), что фактически больше реального физического размера диагонали сенсора. Эти обозначения происходят от стандартных обозначений размеров трубок телекамер в 1950-х годах. Они выражают не размер диагонали самой матрицы, а внешний размер колбы передающей трубки. Инженеры быстро установили, что по различным причинам диагональ полезной площади изображения составляет около двух третей диаметра трубки. Это определение стало устоявшимся (хотя и должно было быть давно отброшено). Не существует чёткой математической взаимосвязи между «типом» сенсора, выраженном в дюймах, и его фактической диагональю. Однако, в грубом приближении, можно считать, что диагональ составляет две трети типоразмера.
| × | Диагональ в видиконовых дюймах | Диагональ в мм | Размер в мм | Кроп-фактор |
|---|---|---|---|---|
| 1 | 13/8" (Плёнка 35 мм) | 36 x 24 | 1 | |
| 2 | "APS-C" | 23.7 x 15.6 | 1.5 | |
| 3 | "APS-C" | 23.5 x 15.7 | 1.5 | |
| 4 | "APS-C" | 23.6 x 15.8 | 1.5 | |
| 5 | "APS-C" | 22.3 x 14.9 | 1.6 | |
| 6 | 4/3" | 18.3 x 13.0 | 2 | |
| 7 | 1" | 12.8 x 9.6 | 2.7 | |
| 8 | 2/3" | 8.8 x 6.6 | 4 | |
| 9 | 1/1.8" | 7.2 x 5.3 | 4.8 | |
| 10 | 1/2" | 8.47 | 6.4 x 4.8 | 5.6 |
| 11 | 1/2.3" | 6.16 x 4.62 | 6 | |
| 12 | 1/2.33" | 6.08 x 4.56 | ||
| 13 | 1/2.5" 6.77 | 5.8 x 4.3 | 6.2 | |
| 14 | 1/2.7" | 6.05 | 5.4 x 4.0 | 6.7 |
| 15 | 1/2.8" | 6.05 | ||
| 16 | 1/3" | 5.64 | 4.8 x 3.6 | 7.5 |
| 17 | 1/3.2" | 4.54 x 3,42 | ||
| 18 | 1/3.6" | 4 x 3 | ||
| 19 | 1/4" | 4.23 | 3.6 x 2.7 | |
| 20 | 1/6" | 2.4 x 1.8 |
Диагонали матрицы 1’’, 1/2’’ и т.д. принято измерять в видиконовых дюймах. Эта единица измерения, равная 2/3 обычного дюйма. Размер матрицы видеокамеры в зависимости от соотношения сторон (4:3 или 16:9) и конкретного производителя, у матриц с одной и той же диагональю физические размеры различны. Поэтому, например, камера на матрице 1/3’’ с соотношением сторон 4:3 дает больший угол обзора по вертикали и меньший по горизонтали, чем камера на матрице с такой же диагональю, но соотношением 16:9.[9] [10]
Отношение сторон кадра
- Формат кадра 4:3 в основном применяется в любительских цифровых фотоаппаратах. Некоторые фирмы, например, Canon, допускают в этих фотоаппаратах настройку соотношения сторон в диапазонах 4:3 и 16:9.[11]
- Формат кадра 3:2 применяется в зеркальных цифровых фотоаппаратах, кроме выполненных по стандарту 4:3.
- Выпускается незначительное число моделей с кадром 16:9.
- В цифровых зеркальных фотоаппаратах Olympus используется матрица с соотношением сторон 4:3 (стандарт 4:3).
Пропорции пикселя
Выпускаются матрицы с тремя различными пропорциями пикселя:
- Для видеоаппаратуры выпускаются сенсоры с пропорцией пикселя 4:3 (PAL)
- или 3:4 (NTSC);
- Фотографическое, рентгенографическое и астрономическое оборудование, а также развивающееся сейчас HDTV видеооборудование обычно имеет квадратный пиксель.
Типы матриц по применяемой технологии
- — ПЗС-матрица (CCD, «Charge Coupled Device»);
- — КМОП-матрица (CMOS, «Complementary Metal Oxide Semiconductor»);
- — SIMD WRD (Wide dynamic range) матрица;
- — Live-MOS-матрица;
- — Super CCD-матрица.
Долгое время ПЗС-матрицы были практически единственным массовым видом фотосенсоров. Реализация технологии Active Pixel Sensors около 1993 года и дальнейшее развитие технологий привели в итоге к тому, что к 2008 году КМОП-матрицы стали практически альтернативой ПЗС.[12]
ПЗС-матрица
ПЗС-матрица (CCD, «Charge Coupled Device») состоит из светочувствительных фотодиодов, выполнена на основе кремния, использует технологию ПЗС — приборов с зарядовой связью.
КМОП-матрица
КМОП-матрица (CMOS, «Complementary Metal Oxide Semiconductor») выполнена на основе КМОП-технологии. Каждый пиксел снабжён усилителем считывания, а выборка сигнала с конкретного пиксела происходит, как в микросхемах памяти, произвольно.
SIMD WRD (Wide dynamic range) матрица, также выполненная на основе КМОП-технологии, имеет в обрамлении каждого пиксела ещё и автоматическую систему настройки времени его экспонирования, что позволяет радикально увеличить фотографическую широту устройства.[13]
Live-MOS-матрица
Создана и применяется компанией Panasonic. Выполнена на основе МОП-технологии, однако содержит меньшее число соединений для одного пикселя и питается меньшим напряжением. За счёт этого и за счёт упрощённой передачи регистров и управляющих сигналов имеется возможность получать «живое» изображение при отсутствии традиционного для такого режима работы перегрева и повышения уровня шумов.
Super CCD-матрица
В фотоаппаратах фирмы Fujifilm применяются матрицы, получившие название «Super CCD», в которых присутствуют зелёные пикселы двух различных размеров. Большие — для малых уровней освещённости. И малые, совпадающие по размеру с синими и красными. Это позволяет увеличить фотографическую широту матрицы на величину до 4-х ступеней.[14]
Методы получения цветного изображения
Сам по себе пиксель фотоматрицы является «чёрно-белым». Для того, чтобы матрица давала цветное изображение, применяются специальные технические приёмы.
Трёхматричные системы

Поступающий в камеру свет, попадая на пару дихроидных призм, делится на три основных цвета: красный, зелёный и синий. Каждый из этих пучков направляется на отдельную матрицу (чаще всего используется CCD матрицы, поэтому в наименовании соответствующей аппаратуры употребляется обозначение 3CCD).
Трёхматричные системы применяются в видеокамерах среднего и высокого класса.
Достоинства трёх матриц по сравнению с одноматричными
- лучше передача цветовых переходов, полное отсутствие цветного муара;
- выше разрешение: отсутствует необходимый для устранения муара размывающий (low-pass) фильтр;
- выше светочувствительность и меньший уровень шумов;
- возможность введения цветокоррекции постановкой дополнительных фильтров перед отдельными матрицами, а не перед съёмочным объективом, позволяет добиться существенно лучшей цветопередачи при нестандартных источниках света.
Недостатки трёх матриц по сравнению с одноматричными
- принципиально бо́льшие габаритные размеры;
- трёхматричная система не может использоваться с объективами с малым рабочим отрезком;
- в трёхматричной схеме есть проблема сведе́ния цветов, так как такие системы требуют точной юстировки, причём, чем большего размера матрицы применяются и чем больше их физическое разрешение, тем сложнее добиться необходимого класса точности.
Матрицы с мозаичными фильтрами
Во всех таких матрицах пиксели расположены в одной плоскости, и каждый пиксель накрыт светофильтром некоего цвета. Недостающая цветовая информация восстанавливается путём интерполяции (подробнее…).
Существует несколько способов расположения светофильтров. Эти способы различаются чувствительностью и цветопередачей, при этом чем выше светочувствительность, тем хуже цветопередача:
- RGGB — фильтр Байера, исторически самый ранний;
- RGBW имеют более высокую чувствительность и фотографическую широту (типично выигрыш чувствительности в 1,5—2 раза и 1 ступень по фотографической широте), частный случай RGBW-матрицы — CFAK-матрица компании Kodak;
- RGEB (красный — зелёный — изумрудный — синий);
- CGMY (голубой — зелёный — лиловый — жёлтый).
Матрицы с полноцветными пикселами
Существуют две технологии, позволяющие получать с каждого пикселя все три цветовые координаты. Первая применяется в серийно выпускаемых камерах фирмы Sigma, вторая — на середину 2008 года существует только в виде прототипа.
Многослойные матрицы (Foveon X3)
Фотодетекторы матрицы X3 компании Foveon расположены в три слоя — синий, зелёный, красный. Название сенсора «Х3» означает его «трёхслойность» и «трёхмерность».
Матрицы X3 применяются в цифровых фотоаппаратах Sigma.
Полноцветная RGB-матрица Nikon
В полноцветных матрицах Nikon (патент Nikon от 9 августа 2007[15] (недоступная ссылка с 16-11-2013 [4060 дней])) лучи RGB предметных точек в каждом пикселе, содержащем одну микролинзу и три фотодиода, проходят через открытую микролинзу и падают на первое дихроидное зеркало. При этом синяя составляющая пропускается первым дихроидным зеркалом на детектор синего, а зеленая и красная составляющие отражаются на второе зеркало. Второе дихроидное зеркало отражает зелёную составляющую на детектор зелёного, и пропускает красную и инфракрасную составляющие. Третье дихроидное зеркало отражает красную составляющую на детектор и поглощает инфракрасную составляющую[16].
Несмотря на то, что прототип матрицы уже создан (2008 год), этот патент вряд ли найдёт своё применение в ближайшее время из-за существенных сложностей в технологии.
По сравнению со всеми прочими системами, кроме трёхматричных, данная технология имеет потенциальное преимущество в эффективности использования светового потока по сравнению с технологиями RGBW или фильтром Байера. (Точный выигрыш зависит от характеристик пропускания фильтров).
По сравнению с Foveon X3, данная технология выигрывает в качестве цветопередачи.
По сравнению с 3CCD системами, данный тип матрицы выигрывает в возможности использования в зеркальных аппаратах и в отсутствии необходимости точной юстировки оптической системы.[15] (недоступная ссылка с 16-11-2013 [4060 дней])
См. также
- Устройство цифрового фотоаппарата
- Цифровой фотоаппарат
- Разрешение (оптика)
- Разрешение (компьютерная графика)
- Разрешение матрицы цифровой фотокамеры
- Advanced Photo System type-C (APS-C)
- 35 мм DOF адаптер
Примечания
- ↑ Сигнал-шум, цифровые аппараты и астрофотография оригинал на английском
- ↑ ГОСТ 21879-88 Телевидение вещательное. Термины и определения.
- ↑ 1 2 3 Владо Дамьяновски. CCTV. Библия видеонаблюдения. Цифровые и сетевые технологии./Пер. с англ.-М.: ООО "Ай-Эс-Эс Пресс", 2006,-480с.
- ↑ [1] Метод измерения JEITA (TTR-4602B) - Japan Electronics and Information technology Industries Association.
- ↑ http://en.wikipedia.org/wiki/Image_resolution#Pixel_resolution
- ↑ CIPA DCG-001-Translation-2005 Guideline for Noting Digital Camera Specifications in Catalogs. "The term 'Resolution' shall not be used for the number of recorded pixels"
- ↑ ANSI/I3A IT10.7000-2004 Photography - Digital Still Cameras - Guidelines for Reporting Pixel-Related Specifications
- ↑ О разрешающей способности
- ↑ http://www.beward.ru/articles/?id=164
- ↑ http://habrahabr.ru/sandbox/67382
- ↑ о формате 16:9 в аппаратах canon
- ↑ CCD vs CMOS: facts and fictions (англ.)
- ↑ описание WDR камеры Pelco CCC5000 Pixim
- ↑ Описание камеры Fujifilm S5 Pro (англ.)
- ↑ 1 2 U.S. Patent 7,138,663
- ↑ о матрице Nikon
Это заготовка статьи о фотографии. Помогите Википедии, дополнив её. |